Опубликовано: Май 24, 2012
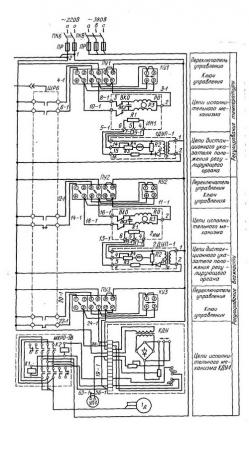
Электрические многоканальные регуляторы Лесосушильные камеры обычно строят блоками по нескольку штук. Поэтому целесообразно применять централизованные многоканальные системы регулирования, в которых при помощи обегающего устройства регулятор поочередно подключается к соответствующим датчикам температуры и влажности сушильного агента и регулирующим органам каждой камеры, причем в многоканальном регуляторе предусматривается блок задатчиков по температуре и влажности, позволяющий устанавливать отдельные режимы для каждой камеры. В ЦНИИМОДе специально для камерной сушки древесины разработаны опытные образцы многоканальных регуляторов: релейно-шагового РША-МП-10 [101] и двухпозиционноіго АТВ-5 [102]. В этих регуляторах в качестве датчиков температуры использованы полупроводниковые термосопротивления MMT-4 и KMT-14, измерительно-регулирующим прибором служит логометр с встроеінным фотореле, дающим сигнал при отклонении температуры от заданной. Регулятор РША-МП-10 рассчитан на регулирование температур по сухому и смоченному термометрам в десяти камерах, а АТВ-2 - в пяти. Регулятор РША-МП-10 включает исполнительные механизмы на открытие или закрытие вентилей на 7-8 с, осуществляя полное открытие или закрытие их за несколько шагов, причем режим регулируется по заранее заданной программе. Время обегания регулятора равно 12,5 мин. Регулятор АТВ-5 имеет цикл обегания 5 мин. Регулирование температуры двухпозиционное. Опытные образцы этих регуляторов внедрены на ряде предприятий, однако широкого распространения не получили главным образом из-за недостаточной точности, нестабильности и невзаимо- заменяемости термосопротивлений, используемых в регуляторах. Серийный выпуск регуляторов не был налажен. На бывшем Московском мебельно-деревообрабатывающем комбинате в 1958 г. на реконструированных камерах Грум-Гржимайло смонтирована и испытана опытная система автоматического регулирования параметров сушильного агента с применением электронного регулятора ЭРТ и обегающего устройства [103, 104]. На основе результатов испытаний этой системы авторами совместно с Московским заводом тепловой автоматики разработан многоканальный импульсный регулятор МИР [104]. Система МИР предназначена для трехпозиционного импульсного регулирования до 25 технологических параметров. Функциональная схема системы МИР показана на рис. 6.13. Назначение элементов системы следующее: первичные приборы служат для измерения регулируемой величины и преобразования ее в электрический сигнал; измерительные блоки предназначены для компенсации электрических сигналов, поступающих от первичных приборов, таким образом, чтобы при заданном значении регулируемого параметра сигнал на выходе измерительного блока был равен нулю; измерительные блоки И-T-M работают в комплексе с термопарами, И-С-М- с термопарами сопротивления, И-1-М- с индуктивными датчиками; электронные усилители Э-М служат для усиления поступаю щих от измерительных блоков электрических сигналов, характеризующих величину отклонения регистрируемого параметра от заданного значения, и управления пусковыми устройствами исполнительных механизмов; обегающее устройство ОУ-25 осуществляет периодическую в любой заданной последовательности связь электронного усилителя с соответствующим измерительным блоком и исполнительным механизмом по каждому из 25 каналов регулирования. Обегающее устройство определяет время связи системы с каждым каналом регулирования, а следовательно, время цикла обегания всех каналов;
электрический исполнительный механизм IV воздействует на регулирующий орган в направлении, способствующем восстановлению заданного значения регулируемого параметра; пульт дистанционного управления типа ПДУ-M служит для отключения воздействия усилителя на исполнительный механизм и дистанционного управления последним; указатель положения УП предназначен для наблюдения (по вызову с пульта управления) за положением выходного вала соответствующего исполнительного механизма любого канала регулирования. Регулятор МИР, выполненный для регулирования процессов сушки древесины, комплектуется измерительными блоками И-Т-М с одной термопарой, служащей для измерения температуры в камерах, и модификацией этих блоков, представляющих собой дифференциальную термопару для измерения влажности агента сушки в камерах. Регулятор МИР испытывался в 1964 г. на Московском мебельно-сборочном комбинате № 2 [98] на эжекционно-реверсивных камерах ЦНИИМОД-41. Во время испытаний отмечалось следующее. Цикл обегания регулятора МИР выбран равным 4 мин, время связи іна каждом канале 9-10 с. При этом полное ,перемещение регулирующего органа происходит за три цикла, т. е. регулятор настроен как трехпозиционный. Время воздействия на исполнительный механизм в данном регуляторе не устанавливается, а равно времени связи. В течение сушки изменялось время связи (9-11 с), происходила разбалансировка измерительных блоков. При настройке на режим требовалась периодическая корректировка, при этом измерительный блок влажности трудно поддавался балансировке, имел слабую чувствительность, наблюдался уход заданного значения во времени. Качество регулирования температуры и влажности в камере в процессе сушки определялось по графикам процесса регулирования. При отклонениях температуры от заданного значения регулятор включал и выключал исполнительный механизм за два шага (цикла) полностью. Регулятор работал как позиционный. Чтобы использовать преимущества импульсного регулирования, необходимо настроить регулятор МИР на большее число шагов, т. е. уменьшить время связи на каждом канале и время обегания. Амплитуды колебаний температур при регулировании довольно значительны (3-4°С), что объясняется наличием большого запаздывания в объекте регулирования и нечувствительностью регулятора. Регулятор МИР не дал при испытаниях лучших результатов по точности регулирования по сравнению с позиционными регуляторами. Ввиду сложности системы МИР в монтаже, настройке и эксплуатации применение ее на деревообрабатывающих предприятиях затруднено, поэтому регулятор МИР не был рекомендован для широкого применения. Специально для автоматизации лесосушильных камер предназначен двухпозиционный шаговый регулятор ДШ-2М, разработанный Свердловским научно-исследовательским институтом переработки древесины [105, 106]. 
Регулятор ДШ-2М представляет собой шкафной щит со съемной задней стеной. На передней панели щита расположен электронный мост, переключатели контроля температуры и дистанционного управления, тумблер включения регулятора, тумблеры включения управления исполнительными механизмами камер, кнопки управления с указателями положения крана и шибера и плафоны ламп коммутатора. В углублении на передней панели, закрываемой дверками, расположены задатчики температуры по сухому и смоченному термометрам. Внутри шкафного щита размещены: коммутатор-распределитель с блоком реле, блок питания с генератором импульсов. Блоки регулятора соединяются через клеммные сборки, расположенные в два ряда внутри шкафного щита. Электрические цепи термометров сопротивления її исполнительных механизмов проложены в стальных трубах, измерительные цепи - по наружным стенам сушильного блока и введены в камеру с торцевой стороны. Конец ввода трубы іс проводом залит жаростойкой мастикой. Измерительные провода МГШВ должны быть медными сечением не менее 1 мм2. В качестве проводов можно использовать также кабель ПРШМ. Силовые провода к исполнительным механизмам прокладывают в трубах по коридору управления. Допускается применение алюминиевых проводов АПР, АПВ и других сечением не менее 2,5 мм2. Ниже описан принцип работы регулятора. Он многоканальный с последовательным обходом регулируемых точек, построен с использованием двух принципов регулирования: двухпозиционного и шагового. Двухпозиционный принцип регулирования состоит в том, что при отклонении регулируемого параметра от заданного регулирующий орган перемещается из одного крайнего положения в другое. Здесь возможны только два крайних положения рабочего органа регулирующего устройства. При шаговом регулировании отклонение подавляется путем частичного (на один шаг) перемещения регулирующего органа из начального положения. В этом случае возможны несколько дискретных положений рабочего органа регулирующего устройства. При двухпозиционном регулировании быстро подавляются большие отклонения от задания, но имеют место сравнительно большие установившиеся колебания регулируемого параметра. При шаговом регулировании большие отклонения от задания подавляются медленно, за несколько шагов, но установившиеся колебания сравнительно невелики. В регуляторе ДШ-2М двухпозиционный и шаговый принципы регулирования соединены так, что совокупный принцип регулирования (двухпозиционно-шаговый) обладает положительными качествами и лишен недостатков, присущих обоим принципам. При значительных отклонениях регулируемого параметра от заданного регулятор работает как двухпозиционный, при небольших - как шаговый. Переход с двухпозиционного на шаговый принцип регулирования осуществляется автоматически по заранее заданному критерию. Система автоматического регулирования с применением опытного образца регулятора ДШ-2 впервые испытывалась на камере ВИАМ-2 (свердловская мебельная фирма «Авангард») ([98]. В качестве датчиков температуры были применены медные термометры сопротивления ТСМ-ХІ. В качестве регулирующих органов на паропроводах установлены краны КР-180, управляемые исполнительными механизмами ИМ-2/120. При испытаниях был выявлен ряд недостатков регулятора: цикл обегания во время сушки изменялся; регулирующий орган редко занимал промежуточное положение, а при отклонении температуры последователыно перемещался из одного крайнего положения в другое; первый шаг регулирующего органа (от положе- Регулятор РША-МП-10 рассчитан на регулирование температур по сухому и смоченному термометрам в десяти камерах, а АТВ-2- в пяти. Регулятор РША-МП-10 включает исполнительные механизмы на открытие или закрытие вентилей на 7-8 с, осуществляя полное открытие или закрытие их за несколько шагов, причем режим регулируется по заранее заданной программе. Время обегания регулятора равно 12,5 мин. Регулятор АТВ-5 имеет цикл обегания 5 мин. Регулирование температуры двухпозиционное. Опытные образцы этих регуляторов внедрены на ряде предприятий, однако широкого распространения не получили главным образом из-за недостаточной точности, нестабильности и невзаимо- заменяемости термосопротивлений, используемых в регуляторах. Серийный выпуск регуляторов не был налажен. На бывш. Mooko bckom мебельно-деревообрабатывающем комбинате в 1958 г. на реконструированных камерах Грум-Гржимай- ло смонтирована и испытана опытная система автоматического регулирования параметров сушильного агента с применением электронного регулятора ЭРТ и обегающего устройства [103, 104]. На основе результатов испытаний этой системы авторами совместно с Московским заводом тепловой автоматики разработан многоканальный импульсный регулятор МИР і[ 104]. Система МИР предназначена для трехпозиционного импульсного регулирования до 25 технологических параметров. Функциональная схема системы МИР показана на рис. 6.13. Назначение элементов системы следующее: первичные приборы служат для измерения регулируемой величины и преобразования ее в электрический сигнал; измерительные блоки предназначены для компенсации электрических сигналов, поступающих от первичных приборов, таким образом, чтобы при заданном значении регулируемого параметра сигнал на выходе измерительного блока был равен нулю; измерительные блоки И-Т-М работают в комплексе с термопарами, И-С-М-с термопарами сопротивления, И-1-М - с индуктивными датчиками; электронные усилители Э-М служат для усиления поступаю щих от измерительных блоков электрических сигналов, характеризующих величину отклонения регистрируемого параметра от заданного значения, и управления пусковыми устройствами исполнительных механизмов; обегающее устройство ОУ-25 осуществляет периодическую в любой заданной последовательности связь электронного усилителя с соответствующим измерительным блоком и исполнительным механизмом по каждому из 25 каналов регулирования. Обегающее устройство определяет время связи системы с каждым каналом регулирования, а следовательно, время цикла обегания всех каналов; электрический исполнительный механизм V воздействует на регулирующий орган в направлении, способствующем восстановлению заданного значения регулируемого параметра; пульт дистанционного управления типа ПДУ-М служит для отключения воздействия усилителя на исполнительный механизм и дистанционного управления последним; указатель положения УП предназначен для наблюдения (по вызову с пульта управления) за положением выходного вала соответствующего исполнительного механизма любого канала регулирования. Регулятор МИР, выполненный для регулирования процессов сушки древесины, комплектуется измерительными блоками И-Т-М с одной термопарой, служащей для измерения температуры в камерах, и модификацией этих блоков, представляющих собой дифференциальную термопару для измерения влажности агента сушки в камерах. Регулятор МИР испытывался в 1964 г. на Московском мебельно-сборочном комбинате № 2 [98] на эжекционно-реверсивных камерах ЦНИИМОД-41. Во время испытаний отмечалось следующее. Цикл обегания регулятора МИР выбран равным 4 мин, время связи іна каждом канале 9-10 с. При этом полное ,перемещение регулирующего органа Происходит за три цикла, т. е. регулятор настроен как трехпозиционный. Время воздействия на исполнительный механизм в данном регуляторе не устанавливается, а равно времени связи. В течение сушки изменялось время связи (9-11 с), происходила разбалансировка измерительных блоков. При настройке на режим требовалась периодическая корректировка, при этом измерительный блок влажности трудно поддавался балансировке, имел слабую чувствительность, наблюдался уход заданного значения во времени. Качество регулирования температуры и влажности в камере в процессе сушки определялось по графикам процесса регулирования. При отклонениях температуры от заданного значения регулятор включал и выключал исполнительный механизм за два шага (цикла) полностью. Регулятор работал как позиционный. Чтобы использовать преимущества импульсного регулирования, необходимо настроить регулятор МИР на большее число шагов, т. е. уменьшить время связи на каждом канале и время обегания. Амплитуды колебаний температур при регулировании довольно значительны (3-4°С), что объясняется наличием большого запаздывания в объекте регулирования и нечувствительностью регулятора. Регулятор МИР не дал при испытаниях лучших результатов по точности регулирования по сравнению с позиционными регуляторами. Ввиду сложности системы МИР в монтаже, настройке и эксплуатации применение ее на деревообрабатывающих предприятиях затруднено, поэтому регулятор МИР не был рекомендован для широкого применения. Специально для автоматизации лесосушильных камер предназначен двухпозиционный шаговый регулятор ДШ-2М, разработанный Свердловским научно-исследовательским институтом переработки древесины [105, 106]. Регулятор ДШ-2М представляет собой шкафной щит со съемной задней стеной. На передней панели щита расположен электронный мост, переключатели контроля температуры и дистанционного управления, тумблер включения регулятора, тумблеры включения управления исполнительными механизмами камер, кнопки управления с указателями положения крана и шибера и плафоны ламп коммутатора. В углублении на передней панели, закрываемой дверками, расположены задатчики температуры по сухому и смоченному термометрам. Внутри шкафного щита размещены: коммутатор-распределитель с блоком реле, блок питания с генератором импульсов. Блоки регулятора соединяются через клеммные сборки, расположенные в два ряда внутри шкафного щита. Электрические цепи термометров сопротивления и исполнительных механизмов проложены в стальных трубах, измерительные цепи - по наружным стенам сушильного блока и введены в камеру с торцевой стороны. Конец ввода трубы іс проводом залит жаростойкой мастикой. Измерительные провода МГШВ должны быть медными сечением не менее 1 мм2. В качестве проводов можно использовать также кабель ПРШМ. Силовые провода к исполнительным механизмам прокладывают в трубах по коридору управления. Допускается применение алюминиевых проводов АПР, АПВ и других сечением не менее 2,5 мм2. Ниже описан принцип работы регулятора. Он многоканальный с последовательным обходом регулируемых точек, построен с использованием двух принципов регулирования: двухпозиционного и шагового. Двухпозиционный принцип регулирования состоит в том, что при отклонении регулируемого параметра от заданного регулирующий орган перемещается из одного крайнего положения в другое. Здесь возможны только два крайних положения рабочего органа регулирующего устройства. При шаговом регулировании отклонение подавляется путем частичного (на один шаг) перемещения регулирующего органа из начального положения. В этом случае возможны несколько дискретных положений рабочего органа регулирующего устройства. При двухпозиционном регулировании быстро подавляются большие отклонения от задания, но имеют место сравнительно большие установившиеся колебания регулируемого параметра. При шаговом регулировании большие отклонения от задания подавляются медленно, за несколько шагов, но установившиеся колебания сравнительно невелики. В регуляторе ДШ-2М двухпозиционный и шаговый принципы регулирования соединены так, что совокупный принцип регулирования (двухпозиционно-шаговый) обладает положительными качествами и лишен недостатков, присущих обоим принципам. При значительных отклонениях регулируемого параметра от заданного регулятор работает как двухпозиционный, при небольших - как шаговый. Переход с двухпозиционного іна шаговый принцип регулирования осуществляется автоматически по заранее заданному критерию. Система автоматического регулирования с применением опытного образца регулятора ДШ-2 впервые испытывалась на камере ВИАМ-2 (свердловская мебельная фирма «Авангард») /[98]. В качестве датчиков температуры были применены медные термометры сопротивления ТСМ-ХІ. В качестве регулирующих органов на паропроводах установлены краны КР-180, управляемые исполнительными механизмами ИМ-2/120. При испытаниях был выявлен ряд недостатков регулятора: цикл обегания во время сушки изменялся; регулирующий орган редко занимал промежуточное положение, а при отклонении температуры последовательно перемещался из одного крайнего положения в другое; первый шаг регулирующего органа (от положения «Закрыто» и «Открыто») не вызывал заметного изменении t n раметров теплоносителя, что вносило дополнительное запаздывании в систему; качество регулирования температуры невысокое (ими литуда колебаний психрометрической разности в среднем доходи ла до ±3°С). В связи с этим при испытаниях в 1964 г. опыпные образцы регулятора ДШ-2 рекомендовали к доработке [98]. дальнейшем регулятор модернизировали (выше приведена харгік теристика усовершенствованного регулятора), вновь испытали и рекомендовали к применению [105, 106]. Интерес представляет разработанная в Московском лесотехническом институте экспериментальная многоканальная система регулирования ИФ-25 для стабилизирующего регулирования температуры и степени насыщенности сушильного агента в каморах периодического действия [107]. Параметры среды регулируют по сухому термометру и психрометрической разности. Датчиками температуры служат электрические термометры сопротивления, регулятор построен на базе электронного автоматического моста ЭМВ-2, число каналов измерения и регулирования 24, они переключаются специальным электромеханическим коммутатором. Цикл обегания длится 104-1352 с. В регуляторе использован шаговый принцип регулирования, число шагов может устанавливаться в зависимости от характеристики системы в пределах 1-80. Особенностью системы является также применение дискретных задатчиков температуры, что повышает точность задания температуры и психрометрической разности. Испытания экспериментального образца системы регулирования на эжекционной реверсивной камере периодического действия показали, что она обеспечивает поддержание температуры и психрометрической разности (в среднем с точностью ±1,5 С. Однако система ИФ-25 была изготовлена МЛТИ в одном экземпляре и несмотря на хорошие результаты при испытаниях не нашла применение в промышленности. Из стандартных электрических многоканальных наибольшее распространение в лесосушильной технике получили регуляторы на базе электронных автоматических мостов, например комплект приборов для автоматического контроля и регулирования MP Ленинградского опытного завода средств контроля автоматики. Эти приборы имеют двенадцать измерительных каналов и могут регулировать по двум параметрам (tc и tM) шесть объектов. Точность контроля и регулирования аналогична точности электронных регулирующих мостов ЭМВ2-211 и ЭМР-209 [108]. В комплект, кроме моста ЭМР-209РД-МЗ, входят блоки задачи БЗ-01 и блоки регулирующих реле БР-01 (по 2 на 12 каналов регулирования) . 
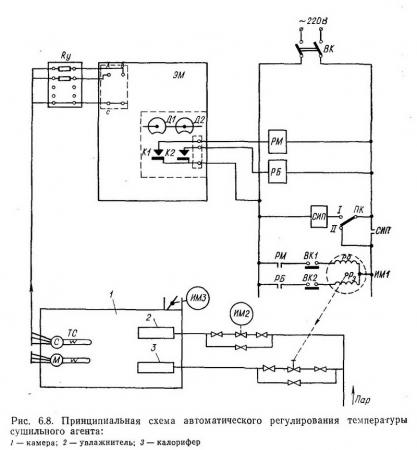
 Принципиальная электрическая схема автоматизации для одной камеры приведена на рис. 6.14, для остальных пяти камер схема аналогична. Датчики температуры (термометры сопротивления TCl и ТС2) присоединены к мосту ЭМP по трехпроводной схеме. Для подгонки сопротивления линии до установленного значения служат подгоночные сопротивления Ry, смонтированные на панели ППС. Температура агента сушки регулируется по сухому термометру, а степень насыщенности - по смоченному, датчики подключаются поочередно. Исполнительными механизмами, регулирующими подачу пара в калориферы и камеру для увлажнения, служат электрические исполнительные механизмы ИМ-2/120 или механизмы дистанционного управления КДУ (колонка дистанционного управления с сервомотором PM). При испытаниях системы регулирования с применением регулятора ЭМР-209РД на эжекционно-реверсивной камере периодического действия датчиками температуры являлись платиновые термометры сопротивления ТСП-753, исполнительными механизмами- ИМ-2/120. При регулировании относительной влажности осуществлялось трехпозиционное регулирование: при уменьшении влажности регулятор управлял подачей пара в камеру через увлажнительные трубы, при увеличении влажности регулятор управлял работой шиберов на приточно-вытяжных каналах, в зоне «Норма» оба регулирующих органа находились в положении «Закрыто».
Время обегания всех двенадцати каналов принималось равным 2 мин, нечувствительность устанавливалась минимальной. При этом амплитуды колебаний температуры и психрометрической разности составляли в среднем ±1,5°С, а установившееся отклонение - менее 1°С. Регуляторы ЭМР-209РД были рекомендованы к широкому применению [98], использованы в типовых проектах некоторых лесосушильных каімер, а также в выпускаемых промышленностью металлических камерах непрерывного действия СП-5КМ. Выпускаются также уравновешенные автоматические самопишущие мосты КСМ4, имеющие аналогичные регулятору ЭМР- 209РД многоканальные регулирующие двух-трехлозиционные устройства с раздельной дистанционной задачей на каждую точку. отрывки (возможны ошибки распознавания, формулы опущены) из книги Автоматизация процессов сушки пиломатериалов Е. С. БОГДАНОВ
От: AntonSokolov,
Скрыть комментарии (отзывы) (0)
Похожие темы:
« Вернуться
|