Опубликовано: Март 26, 2012
Автоматические регуляторыАвтоматически действующее устройство, предназначенное для регулирования какого-либо параметра объекта, называется автоматическим регулятором. Автоматические регуляторы могут быть прямого (непосредственного) и непрямого (косвенного) действия (рис. 7).  и непрямого (косвенного) действия")
Автоматическим регулятором прямого (непосредственного) действия называют простейший регулятор, чувствительный (первичный) элемент которого может непосредственно воздействовать на регулирующий (исполнительный) орган без усилительно-преобразующего устройства и дополнительного источника энергии. Такой регулятор работает исключительно за счет энергии самого регулируемого объекта.
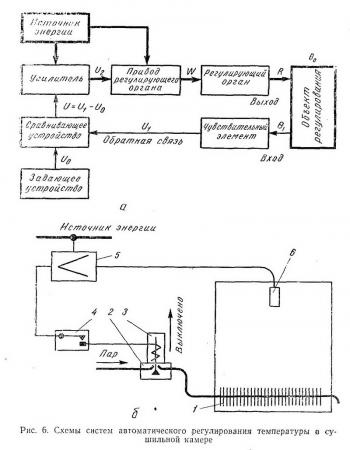
Примером автоматического регулятора прямого действия может служить система стабилизации уровня воды в баке (рис. 8,6). Регулируемым объектом является бак 1, регулируемым параметром - высота уровня воды Н. Значение регулируемого параметра зависит от соотношения между величинами поступления воды Qi и ее расхода Q2. Стабилизация этого параметра достигается регулирующим органом - заслонкой 2, управляемой чувствительным элементом - поплавком 5 через рычаг 3 и задатчик 4. Понижение уровня воды вызывает опускание поплавка, а следовательно, раскрытие заслонки 2, т. е. увеличение поступления воды. При повышении уровня происходит обратный процесс. Автоматическим регулятором непрямого (косвенного) действия называют такой, в состав которого входит усилительно-преобразующее устройство, питаемое извне от дополнительного источника энергии. Схема регулятора непрямого действия, предназначенного для регулирования уровня воды в баке 1, приведена на рис. 9,6. Заслонка 2, регулирующая количество поступающей воды Qb управляется чувствительным элементом - поплавком б не за счет энергии воды, а за счет дополнительной электрической энергии, привлекаемой для работы преобразующего органа - потенциометра 4 и усилительного - электродвигателя 3 (привода регулирующего органа). У рассматриваемого регулятора при среднем положении движка потенциометра, присоединенного к рычагу 5, высота уровня воды равна заданному значению Я, и электродвигатель 3 не работает. При понижении уровня воды поплавок, опускаясь, передвигает ползунок потенциометра в сторону знака плюс, а электродвигатель приоткрывает заслонку 2. При повышении уровня движок перемещается в сторону знака минус, что вызывает вращение электродвигателя в противоположном направлении, а следовательно, прикрытие заслонки.  В зависимости от способа перемещения регулирующего органа автоматические регуляторы могут быть непрерывного и прерывистого действия. У автоматических регуляторов непрерывного регулирования регулирующий орган занимает, кроме крайних, любое промежуточное положение в зависимости от протекания процесса. Примерами таких регуляторов могут служить приведенные на рис. 8 и 9. У автоматических регуляторов прерывистого регулирования регулирующий орган занимает только два крайних положения (у двухпозиционных) или два крайних и несколько промежуточных (у многопозиционных).  Примером двухпозиционного прерывистого регулятора является автоматический регулятор температуры, приведенный на рис. 6,6. Здесь регулирующий орган (вентиль регулирования- подачи пара) может быть открыт или закрыт, т. е. занимать, только два крайних положения. Характер протекания процесса непрерывного регулирования- определяется законом регулирования, т. е. зависимостью выходной величины автоматического регулятора от входной. Закон регулирования определяется управляющим устройством регулятора. По этому признаку автоматические регуля-- торы подразделяются на статические и астатические. Их особенности можно рассмотреть на примере автоматических регуляторов уровня воды (см. рис. 8 и 9). Статическим или пропорциональным называют такой регулятор, который обеспечивает регулирующее воздействие, пропорциональное отклонению регулируемой величины: 
Это воздействие достигается включением в состав регулятора статических элементов и использованием жестких обратных связей. В статическом регуляторе уровня воды, изображенном на рис. 8,6, значение регулируемого параметра не остается постоянным, а зависит от величины возмущающего воздействия. Для поддержания уровня на одной и той же высоте необходимо, чтобы поступление воды равнялось ее расходу Поступление воды зависит от раскрытия заслонки 2, т. е. от положения поплавка 5. Чем больше расход воды, тем больше- должна быть приоткрыта заслонка и тем ниже при установившемся режиме работы регулятора будет находиться поплавок, с уменьшением расхода воды положение поплавка выше. Таким образом, уровеньводы в баке зависит от величины расхода воды т. е. от величины возмущения, и колеблется в некоторых небольших пределах относительно среднего значения. Работа статического регулятора всегда отличается некоторой постоянной погрешностью. К положительным особенностям его относится малая склонность к колебаниям регулируемого параметра. Статические регуляторы, как более простые по устройству, применяются в тех случаях, когда небольшая погрешность в их работе не оказывает существенного влияния нерегулируемый объект. В астатическом регуляторе выходная величина у (регулирующее воздействие) пропорциональна интегралу от отклонения регулируемой величины:  пропорциональна интегралу от отклонения регулируемой ве") В таком регуляторе (см. рис. 9,6) значение регулируемого параметра не зависит от величины возбуждения. В рассматриваемом примере это обеспечивается тем, что между чувствительным элементом - поплавком 6 и регулирующим органом - заслонкой 2 отсутствует жесткая связь. При установившемся режиме и различных значениях расхода Q2 воды заслонка будет занимать разные положения, а поплавок - всегда одно и то же, отвечающее заданному значению H уровня воды в баке. Астатический регулятор в отличие от статического лишен статической погрешности регулирования. Однако он склонен к колебательным процессам и не всегда устойчив в работе. Чтобы автоматический регулятор был пригоден для практического использования, необходимо обеспечить устойчивость системы и приемлемое качество регулирования. Устойчивость системы автоматического регулирования определяется рядом показателей, отображающих характер переходных процессов при регулировании. В специальной литературе приводятся критерии и методы анализа устойчивости регуляторов [45]. Под качеством процесса регулирования понимают соответствие между заданным и фактическим изменением регулируемого параметра. Обычно это качество определяется следующими показателями:
1) разницей между заданной и фактической величинами регулируемого параметра в установившемся режиме (ошибкой системы); 2) перерегулированием (забросом), т. е. наибольшим отклонением фактической величины параметра от заданной; 3) временем регулирования (быстродействием системы), которое принимается равным продолжительности переходного процесса от его начала до момента, когда регулируемый параметр приобретает величину, близкую (обычно 95-97%) к значению в установившемся режиме; 4) числом колебаний регулируемого параметра в заданное время. Повысить устойчивость и качество регулирования систем автоматического регулирования можно двумя способами: путем изменения параметров регулируемого объекта или регулятора и путем изменения структурной схемы регулятора. Практически обычно изменяют структурную схему регулятора, для чего вводят дополнительные звенья. Устройства автоматических регуляторов, состоящие из таких звеньев, называются корректирующими. Часто они представляют собой разного рода дополнительные (внутренние) обратные связи. Из автоматических регуляторов с корректирующими устройствами наиболее распространены изодромный и с воздействием по производной (с предварением). Изодромные регуляторы обеспечивают регулирующее воздействие, пропорциональное отклонению регулируемой величины и его интегралу:

Таким образом, эти регуляторы обладают хорошими динамическими свойствами статических регуляторов в сочетании с хорошими статическими свойствами (например, отсутствие установившегося отклонения) астатических регуляторов. Такое сочетание достигается с помощью гибких обратных связей, действующих только во время переходных процессов для затухания колебаний и отсутствующих в установившемся режиме.  Схема изодромного регулятора с гибкой обратной связью в виде катаракта для автоматического регулирования температуры приведена на рис. 10. Температура в камере 18 измеряется термометром сопротивления 17, включенным в одно из плеч измерительного электрического моста 15. В одну из диагоналей моста включена обмотка чувствительного поляризованного реле 9, а питание второй диагонали осуществляется от источника постоянного напряжения. Стабилизируемая температура устанавливается задатчиком 16, который перемещает движок одного из сопротивлений R электрического моста. При температуре в камере выше заданной реле 9 замыкает контакт 10, включающий обмотку 8 реверсивного двигателя 7 постоянного тока. Двигатель вращает валик 2, соединенный с вентилем 1 паропровода, уменьшая тем самым подачу пара в калорифер 19 камеры. При понижении температуры в камере направление тока в обмотке поляризованного реле меняется на противоположное и реле замыкает контакт 11, включающий обмотку 6. Двигатель начинает вращаться в обратную сторону, и валик 2 открывает вентиль 1, вследствие чего подача пара в калорифер 19 увеличивается. Изодромное устройство для улучшения динамической характеристики регулятора осуществлено с помощью катаракта (гидравлического тормоза) 4 с пружиной 5. При вращении валика 2 перемещается рычаг 3, а вместе с ним и катаракт 4 с движком 12 потенциометра 14. Благодаря этому изменяется соотношение между сопротивлениями, включенными в плечи моста 15, и на обмотку реле 9 поступает дополнительный корректирующий сигнал. Жесткая связь рычага 3 с движком 12 существует лишь при быстрых перемещениях рычага в переходных процессах, так как тогда малое отверстие демпфера 13 препятствует переходу масла из одной полости катаракта в другую и шток с цилиндром катаракта перемещается как одно целое. По истечении некоторого времени,когда переходный процесс закончится, пружина 5 катаракта возвращает поршень и движок 12 в исходное положение, пропуская масло через демпфер 13 из одной полости цилиндра катаракта в другую. Таким образом, по окончании процесса регулирования равновесие моста, заданное задатчиком 16, вновь восстанавливается. Если регулируемый объект отличается большой емкостью (постоянная времени велика), применение изодромного регулятора с гибкой обратной связью не обязательно. В этом случае можно использовать статические регуляторы с жесткой обратной связью (см. пунктир на рис. 10). Регуляторы с воздействием по производной отклонения осуществляют регулирование по отклонению и его производной, что позволяет учитывать характер изменения регулируемой величины. Поэтому их называют также р е- гуляторами с предварением. Эта особенность существенна при регулировании быстропротекающих процессов. Закон регулирования таких регуляторов можно выразить уравнением 
Регуляторы с воздействием по производной подавляют колебания и повышают быстроту действия системы, улучшая таким образом качество переходных процессов. Эффект улучшения качества переходных процессов в регуляторах с предварением можно проследить на рис. 11. Предположим, что изменение регулируемого параметра во времени выражается сплошной кривой( рис. 11,а). Величина производной  графически определяется на клоном касательной к соответствующей точке кривой и равна тангенсу угла наклона этой касательной. На рис. 11,6 построен график изменения производной во времени . Как видно из сопоставления кривых, нулевым значениям регулируемого параметра отвечают наибольшие значения графически определяется на клоном касательной к соответствующей точке кривой и равна тангенсу угла наклона этой касательной. На рис. 11,6 построен график изменения производной во времени . Как видно из сопоставления кривых, нулевым значениям регулируемого параметра отвечают наибольшие значения
производных, а для максимумов функции = 0. Рассмотренный ранее статический пропорциональный регулятор без корректирующих устройств уменьшает рассогласование между заданной и фактической величинами параметров не только пока оно имеется, но и (за счет инерции) некоторое время после его устранения. Поэтому такой регулятор переключается на действие в обратном направлении не в точке В, когда рассогласование равно нулю, а несколько позже, на участке ВС, оказывая некоторое время воздействие, противоположное требуемому.  Регулятор с предварением действует иначе. На участке возрастания отклонения регулируемого параметра от заданного действие регулятора форсируется, так как в начале переходного процесса отклонение и производная имеют одинаковые знаки, а производная имеет наибольшее значение, когда Ax близко к нулю. Благодаря этому наибольшее отклонение параметра в начале переходного процесса уменьшится, на- прішер точка А займет положение Ai. На участке AB, в связи с уменьшением отклонения регулируемого параметра, производная меняет знак. Поэтому регулятор подает воздействие, равное не сумме, а разности сигналов по отклонению и производной, т. е. меньшее. Если регулятор без предварения получил команду переключения на действие в противоположном направлении вблизи точки В, то регулятор с предварением получает такую команду раньше, например вблизи точки Е, когда сигналы по отклонению и производной равны. Переключение регулятора на действие в противоположном направлении до прекращения отклонения параметра предотвращает это отклонение в отрицательную сторону. Переходный процесс может стать апериодическим, как показано пунктиром на рис. 11,а [19]. Корректирующие устройства, применяемые для дополнительного воздействия регулятора на объект, пропорционального производной от регулируемого параметра, могут быть различны. Разными способами может быть также осуществлено их включение в схему. На рис. 11,в приведена элементная схема системы автоматического регулирования с воздействием по производной. Здесь корректирующее устройство представляет собой дифференцирующий элемент, включенный последовательно в основную цепь воздействия звеньев системы. На входэтого звена подается отклонение регулируемого параметра , а на выходе получается величина , равная сумме двух слагаемых, из которых первое пропорционально отклонению регулируемого параметра, а второе - производной от этого отклонении. Выходные параметры преобразующего, исполнительного и регулирующего элементов обозначены функциями цуг от времени і. На рис. 11,г дана принципиальная схема автоматического регулирования скорости вращения вала электрического двигателя постоянного тока, соответствующая элементной схеме на рис. 11,в. Дифференцирующий элемент (показан пунктиром) представляет собой контур сопротивлений RiR2 и емкости С, собранный таким образом, что 
, т. е.
В схеме измерительном элементом является тахогенератор , его напряжение пропорционально числу оборотов п электродвигателя Д. Это напряжение сравнивается с заданным напряжением на потенциометре задатчика. Выходное напряжение U3 дифференцирующегоконтура подается на усилитель 1, аусиленное напряжение приложено к обмотке возбуждения электромагнитного усилителя ЭМУ, используемого в качестве регулирующего элемента системы. Система работает следующим образом. При увеличении нагрузки 2 электродвигателя Д скорость вращения п его вала уменьшается. В связи с этим уменьшается величина вырабатываемого тахогенератором напряжения и, следовательно, увеличивается напряжение рассогласования системы. В результате последнего обстоятельства увеличивается напряжение на обмотках возбуждения ЭМУ, что приводит к возрастанию силы тока /, протекающего через якорь двигателя Д. Увеличение силы тока двигателя обеспечивает увеличение вращающего момента Л1вп - кі, что приводит к возрастанию скорости вращения вала двигателя. Так как величина производной будет наибольшей в самом начале переходного процесса (когда близко к 0), регулятор начнет действовать раньше, чем наступит необходимое рассогласование регулируемого параметра. Действие регулятора в начале переходного процесса будет форсированным, так как отклонение параметра и производная имеют одинаковые знаки.
В середине переходного процесса, когда отклонение параметра достигает наибольшего значения, производная превращается в нуль, поэтому она способствует уменьшению перерегулирования параметра. В конце переходного процесса производная вновь приобретает наибольшее значение, однако с противоположным знаком. Это способствует уменьшению длительности переходного процесса, который может стать апериодическим.
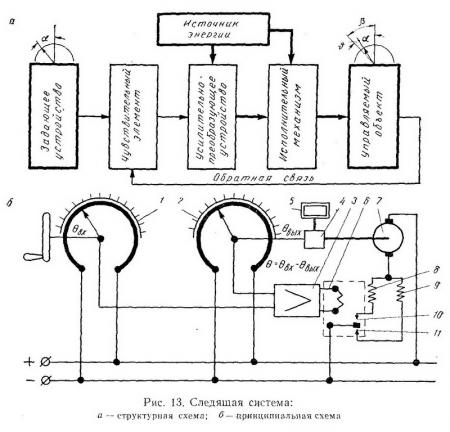
Автоматические регуляторы непрямого действия, предназначенные для регулирования какого-либо параметра по заранее заданной программе, вместо ручной настройки оборудуются программными задающими устройствами (рис. 12).
В случае применения электрических чувствительных элементов и усилительно-преобразующего устройства в качестве программного может быть использован часовой механизм 1, приводящий во вращательное движение профилированный кулачок 2, воздействующий на движок потенциометра 3 эталонного напряжения (рис. 12,6). Форма профилированного кулачка соответствует программе регулирования.  Регулирование с изменением значения регулируемой величины по заранее заданному закону называется программным регулированием. При программном регулировании автоматический регулятор «стремится» ликвидировать рассогласование между напряжением Ui на выходе чувствительного элемента и переменным напряжением UQ задающего устройства. «Отрабатывая» задаваемое на входе переменное напряжение U0, система осуществляет соответственное изменение регулируемой величины (например, температуры Ѳ) на выходе. Автоматические регуляторы непрямого действия можно выполнять универсальными, пригодными для регулирования разных параметров процессов. Например, к измерительной системе таких регуляторов может быть присоединен любой воспринимающий (первичный) элемент, вводящий необходимое воздействие и интенсивность. К выходу исполнительного органа регулятора могут быть присоединены разные регулирующие органы в соответствии с. видом и интенсивностью выходного воздействия [19, 35, 45, 59, 75]. отрывки из книги Автоматизация технологических процессов в деревообработке, Н. В. МАКОВСКИЙ (внимание! возможны ошибки распознавания)
От: LidiaZaiceva,
Скрыть комментарии (отзывы) (0)
Похожие темы:
« Вернуться
|